RRT Path Planning
September 1, 2018
Overview
This is the last Python challenge from Northwestern MSR (Masters in Science in Robotics) Hackathon experience. The purpose of the hackathon challenge was not only to enhance skills in Python by solving challenging problems, but also to practice use in Git to prepare for an exciting year in the MSR program.
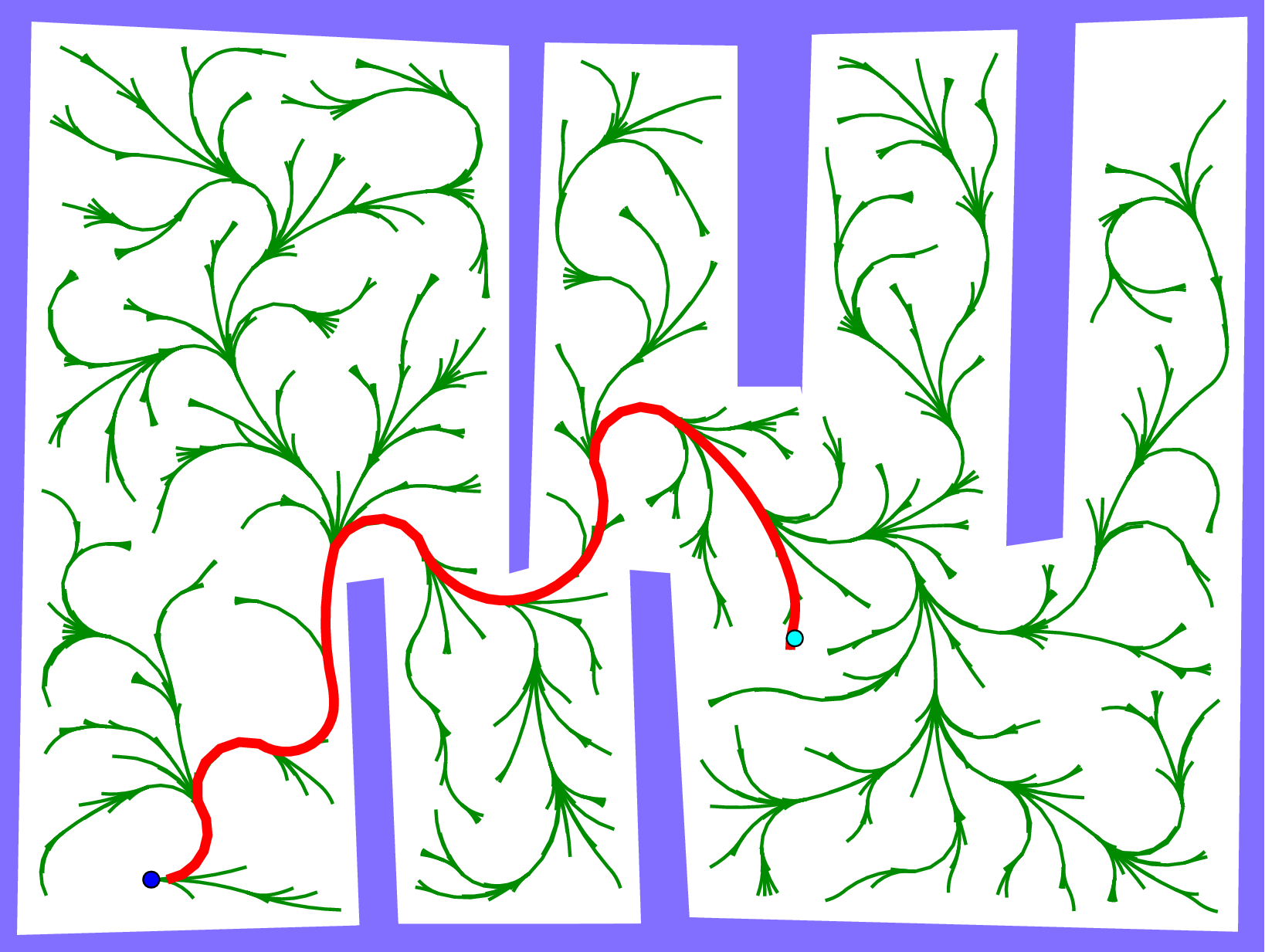
In this project, I developed a Python program to demonstrate the use of the A Rapidly-Exploring Random Tree (RRT), one of the most important tools used in robotic path planning. An RRT is an algorithm that guarantees rapid exploration of some vector space. Demonstration of a simple RRT is implemented in this RRT code.
More detailed instructions for this challenge are outlined here.