Kuka YouBot Manipulation
March 1, 2019
Overview
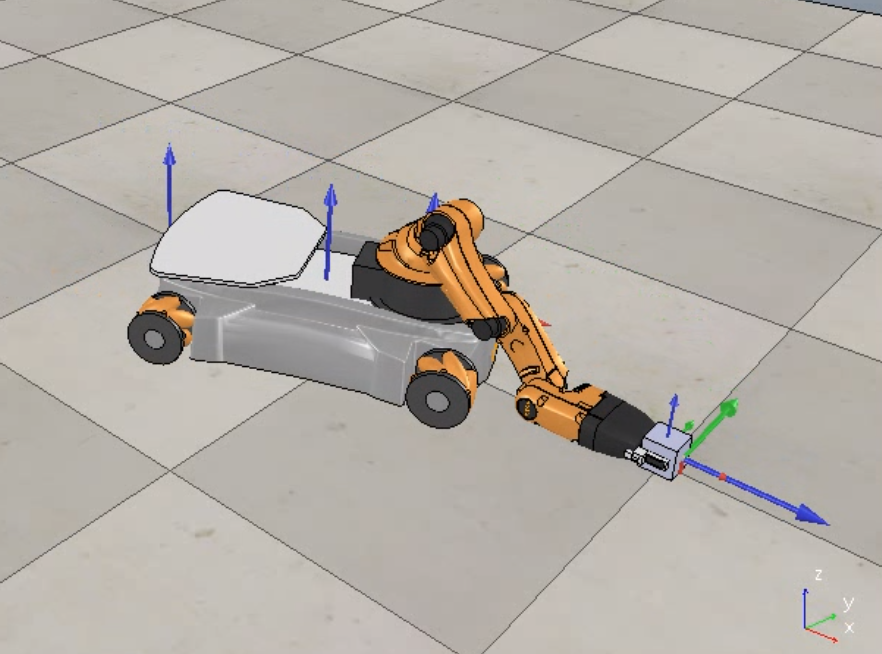
In this project, I aimulated a mecanum-wheeled-robot’s end-effector to grasp, carry, and drop a cube to specified locations. I used rigid body transformations, forward and inverse kinematics, feedback control, odometry, Python and V-REP sumlator.
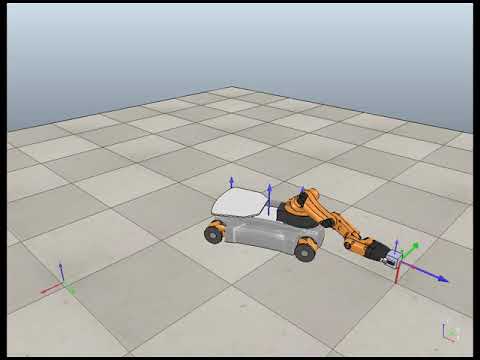
Demo videos
Best Test Run:
Feedforward plus PI with at least 30 degrees of orientation error and 0.2 m of position error from the first configuration of the reference trajectory
Type of Controller: feedfoward-plus-PI Gains: Kp = 0.32 , Ki = 280.07009
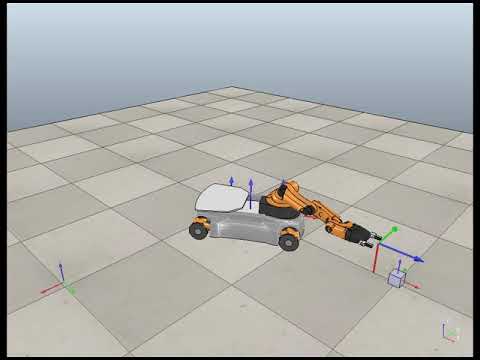
Overshoot Test Run:
Feedforward plus PI with at least 30 degrees of orientation error and 0.2 m of position error from the first configuration of the reference trajectory
Type of Controller: feedfoward-plus-PI Gains: Kp = 3, Ki = 700
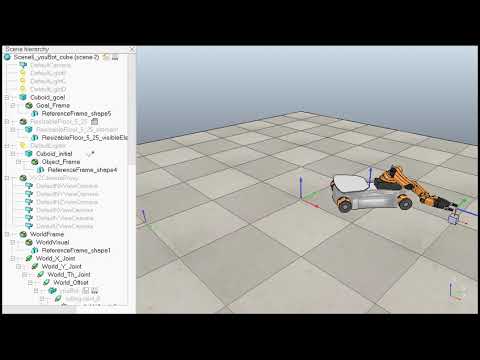
New Task Test Run
Feedforward plus PI with at least 30 degrees of orientation error and 0.2 m of position error from the first configuration of the reference trajectory
Type of Controller: feedfoward-plus-PI Gains: Kp = 0.32, Ki = 225
Initial and Goal Configurations of cube are adjusted, and the new data is shown below:
Initial target configuration TscInit = np.array([[1,0,0,1], [0,1,0,0.5], [0,0,1,0.025], [0,0,0,1]])
Goal target configuration TscFin = np.array([[0,1,0,-0.5], [-1,0,0,-1], [0,0,1,.025], [0,0,0,1]])
Note Github code not available publicaly due to academic purposes. However, I can speak at length with those who have interests about the technical aspects of the code written for this project.